背景
最近计算图像残差时,尝试了用三种方式读取图像,很多时候读取的图像往往都是unit8类型,这样便导致残差的计算全为正数的情况,需要通过numpy类型转换函数进行转换
opencv
type查看python中元素的类型(list、dict、string、float、int)dtype查看numpy ndrray的数据类型(float、int)numpy中使用astype,及直接指定dtype = 'float32'进行转换,其中dtype可以省略1
2
3
4
5
6
7
8
9
10
11
12
13
14import cv2
import numpy as np
s1 = cv2.imread('1.png')
print (type(s1)) # <type 'numpy.ndarray'>
print (s1.dtype) # uint8
# 通过下面的函数进行数据类型转换,再进行残差计算
s1 = s1.astype(int16)
s1 = s1.astype(float32)
s1 = np.array(s1, 'int16')
s1 = np.array(s1, dtype='int16')
# 保存图片前先Scale到[0, 255]之间
s1 = np.maximum(ss, 0) # < 0 = 0
s1 = np.minimum(ss, 255) # > 255 = 255
cv2.imwrite("Recon.png", s1)
PIL
采用PIL模块的Image.fromarray(image).save方式存取的是无损图像,一般的图像差值处理顺序是:float32, clip(0,1)*255, round, cast uin81
2
3
4
5
6
7
8
9import numpy as np
from PIL import Image
import scipy.misc
s1 = Image.open('1.png')
image_1 = np.array(s1)
print (image_1.dtype) # uint8
image1 = np.array(img1, dtype='float32')
print (image_1.dtype) # float32
Image.fromarray(image).save(test_set_dir + str(i)+'.png')
Tensorflow
用tensorflow直接保存图像的情况使用较少,可以预先产生一个tf.gfile.FastGFile文件,接着将图片信息写入即可,注意这里又多出了两种类型转换函数:tf.image.convert_image_dtype,tf.cast1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28import tensorflow as tf
img_name = ["1.jpg"]
filename_queue = tf.train.string_input_producer(img_name)
img_reader = tf.WholeFileReader()
_,image_jpg = img_reader.read(filename_queue)
image_decode_jpeg = tf.image.decode_jpeg(image_jpg)
# 两种类型转换函数
image_decode_jpeg = tf.image.convert_image_dtype(image_decode_jpeg, dtype=tf.float32)
# image_decode_jpeg = tf.cast(image_decode_jpeg, tf.float32)
sess = tf.Session()
coord = tf.train.Coordinator()
threads = tf.train.start_queue_runners(sess=sess, coord=coord)
image_flip_up_down = tf.image.flip_up_down(image_decode_jpeg)
image_flip_up_down = tf.image.convert_image_dtype(image_flip_up_down, dtype=tf.uint8)
image_flip_up_down = tf.image.encode_jpeg(image_flip_up_down)
img_up_down = sess.run(image_flip_up_down)
hd = tf.gfile.FastGFile("ud.png", "w")
hd.write(img_up_down)
hd.close()
coord.request_stop()
sess.close()
print("test end!")
 接着将图像分割成$8\ast 8$的小块,用于后续$DCT$变换的单独处理。
接着将图像分割成$8\ast 8$的小块,用于后续$DCT$变换的单独处理。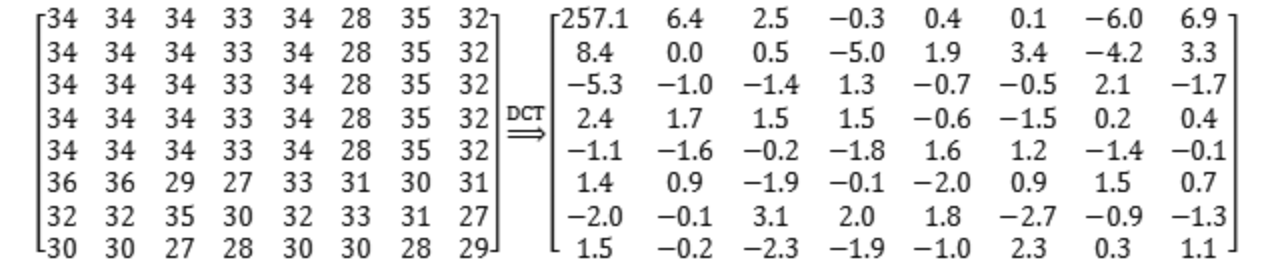
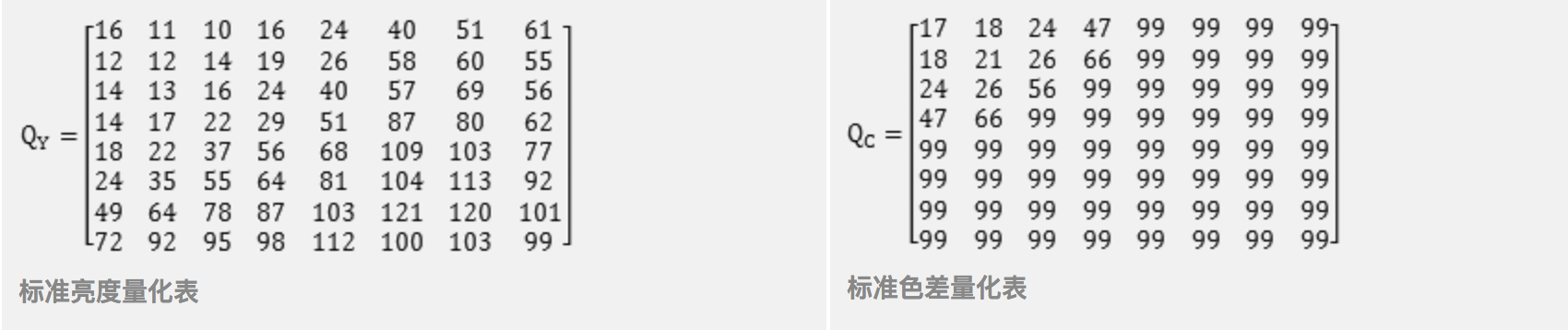 但量化时候并不是随便scale,经过长期的经验,人们得到了上面两张量化表,对应位置相除即可(在量化表上乘一个系数,可以得到不同的压缩比)。量化后的结果如下,右下角已大部分为0。
但量化时候并不是随便scale,经过长期的经验,人们得到了上面两张量化表,对应位置相除即可(在量化表上乘一个系数,可以得到不同的压缩比)。量化后的结果如下,右下角已大部分为0。 接着将上述矩阵按Z形编码,得到一个一维数组:
接着将上述矩阵按Z形编码,得到一个一维数组: